
脳にヒントを得たチップは、データセンターを超えてAIを推進し、デバイスにおけるリアルタイムの意思決定を可能にしています。しかし、彼らの約束を果たすには、シリコンからインフラストラクチャを再考する必要があります。
昆虫のような反射で倉庫を織るドローン、またはユーザーに合わせてリアルタイムで調整する義肢を撮影します。これらは遠い未来の概念ではない。これらは、人間の脳を模倣するように設計された新しいクラスの人工知能(AI)ハードウェアであるニューロモーフィックコンピューティングのための初期のプルーフポイントです。
ニューロモルフィックチップは、生物学的ニューロンと同様に、意味のある入力のためにのみ活性化するスパイクニューラルネットワーク(SNN)を使用してデータを処理します。メモリと処理ユニットを分離する中央処理ユニット(CPU)とグラフィック処理ユニット(GPU)とは異なり、ニューロモーフィックコンピューティングはこれらのコンポーネントを統合して効率的な並列データ処理を行います(図1を参照)。
その結果、消費電力が大幅に削減され、応答時間が短縮され、エッジの制約のある環境に適したコンパクトな設計が実現します。これは、2025年に2,610億ドル、2028年には3,800億ドルに達すると予測され、かつてないほど重要なことです。
図1. BrainScaleS-2シングルニューロモルフィックチップは、ニューロモルフィックコンピューティングアプリケーションに使用されるシステムの1つです。出典:オープンニューロモルフィック。
ニューロモーフィックコンピューティングの仕組み
ニューロモルフィックチップは、メモリとコンピューティングを正確な場所に統合します。この設計は、データが別々の処理ユニットとメモリユニットの間で絶えず移動するときに発生するフォン・ノイマンのボトルネックを回避します。これらのチップは、データを継続的にチャリングする代わりに非同期的に動作し、センサー入力が変化する場合にのみ計算をトリガーします。このイベント駆動型モデルは、従来のシステムと比較して、不要な処理を最小限に抑え、消費電力を最大100倍削減できます。
たとえば、IntelのLoihiは、わずか70ミリワットで100万以上のニューロンをシミュレートします。同様のワークロードを実行する従来の GPU は、数ワットまたはキロワットを消費する場合があり、リモート環境やモバイル環境での使用が制限されます。
ニューロモーフィックコンピューティングの利点
ニューロモーフィックコンピューティングは限界利益に関するものではありません。これは、AIがエッジでどのように動作するかの構造的な変化を表しています。
超低消費電力
ニューロンの発火を必要なときにのみ模倣することで、ニューロモルフィックチップはアイドル電力の使用を最大100倍削減します。
低レイテンシー
スパイク・ネットワークは、ロボティクス、リアルタイム診断、クローズドループ制御システムに不可欠な100ミリ秒未満の応答時間をサポートします。
並列処理
非同期実行により、これらのシステムはボトルネックを発生させることなく複数のセンサ入力を同時に処理できます。
ノイズ耐性
ニューロモルフィックチップは混沌とした環境によく適しており、従来のAIモデルよりも不完全なデータや非構造化データを効果的に処理できます。
コンパクトなデザイン
電力と熱の必要性が減るため、組み込みデバイスへの導入が可能になり、大規模な冷却システムやクラウドへのオフロードが不要になります。
これらの機能を組み合わせると、ニューロモーフィックシステムがデータセンター外の効率的で自律的なAIをサポートできることが示唆されます。
ニューロモーフィックコンピューティングのユースケース
ヘルスケア
神経型チップは、低出力ECG解析およびリアルタイム動作に応答する適応補綴物のために探索されている(図3参照)。SpiNNakerやBrainScaleSのようなプラットフォームは、医学的な文脈における脳のような処理の実行可能性を実証しています。IntelのLoihiのような新しいチップは、脳機械インターフェイスで有望性を示し、ロボットのリムを制御するためにニューラル信号をデコードし、モビリティ回復の道を開きます(図2を参照)。
SNNを使用した分子シミュレーションとタンパク質フォールディングの研究は、エネルギーコストを削減し、薬剤開発と医療治療の効率と手頃な価格を改善するのに役立ちます。
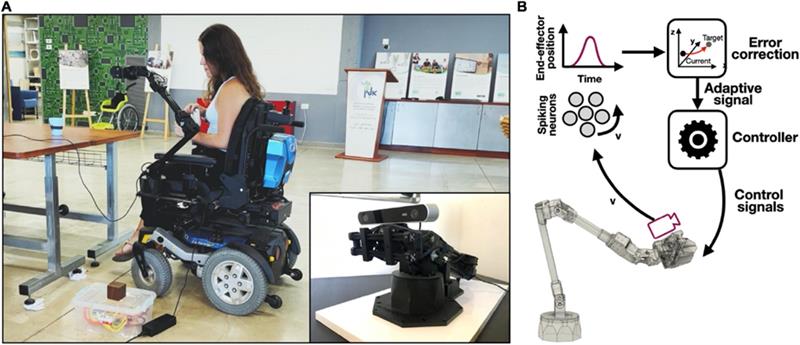
図2. 画像A(左):ニューロモーフィック制御車椅子取り付けロボットアームプロトタイプ、研究著者のYuval Zaidelによって実証。画像B(右):制御アーキテクチャ:リアルタイムの位置調整のためのスパイキングニューラルネットワーク処理加速度計データ。出典:Frontiers | 神経形態的に統合された速度の読み取り値とオンライン学習を備えた車椅子搭載ロボットアームの適応制御。
気候モデリングと物理学
CERNでは、ニューロモーフィック原理に触発されたイベントベースのセンサーが、ノイズの多いハイスループット環境で粒子を追跡するために使用されています。サンディア国立研究所は、従来スーパーコンピュータが支配していたフィールドである気候シミュレーションに必要なエネルギーを減らすために、同様のチップを使用しています。
ロボティクスとIoT
マサチューセッツ工科大学(MIT)のGrasping Neural Processは、1,000のジオメトリと5,000のオブジェクトで訓練されたSNN駆動のロボットアームを実証し、倉庫のようなダイナミックな環境で信頼性の高いピックアップを可能にしました。
研究者は、網膜に触発されたカメラであるダイナミックビジョンセンサ(DVS)を使用して、光の変化を捉えています。これらのセンサーにより、ドローンは昆虫のような俊敏性と超低レイテンシーで混雑した空間をナビゲートできます。
Propheseeのような企業は、スマート監視のためのイベントベースのビジョンシステムを商品化し、帯域幅とエネルギーのニーズを減らしています。そのセンサーは、消費電力を抑えながら、毎秒10,000フレーム以上を達成できます。
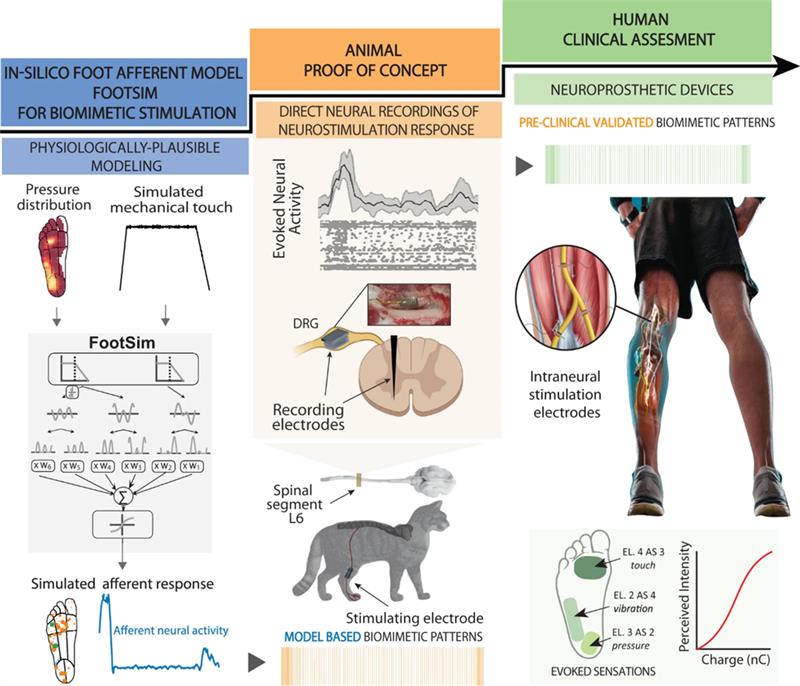
図3. 体性感覚神経プロテーゼの開発は、3つの主要な柱に依存しています。(1)コンピュータモデルを使用して、神経系がタッチ(青色のセグメント)にどのように反応するかを模倣する、(2)神経刺激戦略(オレンジ色のセグメント)を検証するための動物試験、DRG—後根神経節。(3)実生活シナリオ(グリーンセグメント)における技術の有効性を評価するため、人間との臨床試験を実施すること。出典:自然のコミュニケーション
財務とサイバーセキュリティ
IBMは、不正検知のためのSNNの使用について調査しました。彼らは、金融取引のパターンを高精度で識別するモデルを訓練しました。これらのシステムは、最小限のデータで新たな脅威に適応できます。
インフラが必要とするもの
ニューロモーフィックシステムをサポートするには、エッジでの追加アップグレード以上のものが必要です。需要に応じて拡張し、変化するワークロードに適応し、スペースや電力に制約のある環境に適合する、専用のインフラストラクチャ(図4を参照)が必要です。
例えば、直接からチップへの液体冷却は、空気のみよりも散発的な熱をより効果的に管理することができます。液体冷却と空冷を組み合わせたVertivの涼しいアプローチは、安定したパフォーマンスを維持しながら、全体的なエネルギー使用量を削減します。同様に、電力供給システムは、過剰建設することなく急激な電流変化に迅速に対応する必要があり、コストと物理的なフットプリントの両方が増加します。高速相互接続は、高速でローカライズされたデータ処理をサポートするためにも必要です。
運用面では、ニューロモーフィックワークロードには異なる考え方が必要です。SNNと非同期アーキテクチャは、ほとんどのAIトレーニングパイプラインで使用されるモデルとは根本的に異なります。チームは、イベント駆動型システムの使用方法と、その維持方法を理解する必要があります。エンジニアは、予測不可能な負荷と動的な動作を設計する必要があります。
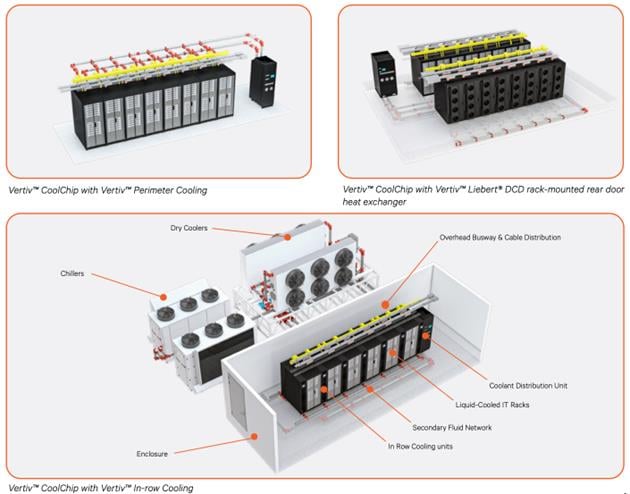
図4.例えば、Vertiv℠ Infrastructure SolutionsとVertiv℠ CoolChipのようなモジュール式ソリューションは、直結型液冷と適応可能なエアサイド戦略を組み合わせたもので、すでにニューロモーフィックコンピューティングのようなエッジで高性能ワークロードを処理するように設計されています。
今後の準備
ニューロモーフィックコンピューティングは概念ではない。エッジインテリジェンスの仕組みはすでに再構築されています。ロボット工学や医療から気候モデリングやサイバーセキュリティまで、アプリケーションはここにあります。遅れているのはインフラです。
エッジに AI を導入する予定なら、これらの新しいワークロードをサポートするように設計されたシステムが必要です。これは、ラック密度、熱戦略、電力応答性を評価することを意味します。それはまた、この新しいAIパラダイムを理解している人々に投資することを意味します:部分神経科学、部分工学、部分システム設計。
エッジAIの進化は、現在のインフラストラクチャが新たな需要にどのように対応するかにかかっています。
Vertiv Nunc AI Hub にアクセスして、神経型のパフォーマンスのために構築されたインフラストラクチャ ソリューションを、エッジで、リアルタイムで、拡張可能な効率でご覧ください。
